SLAM Collection Device
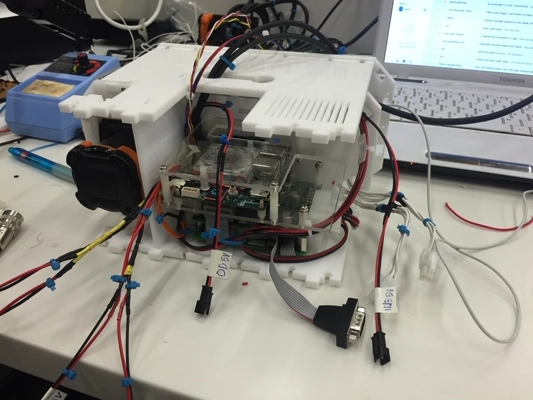
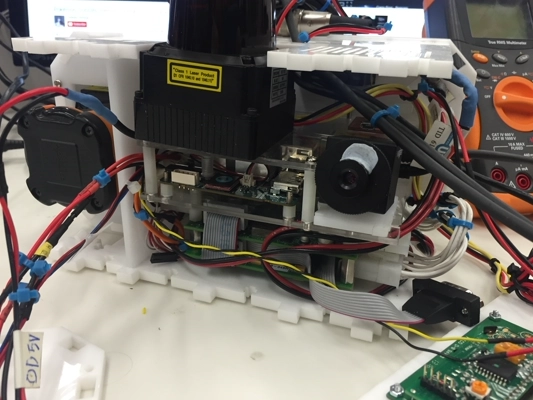
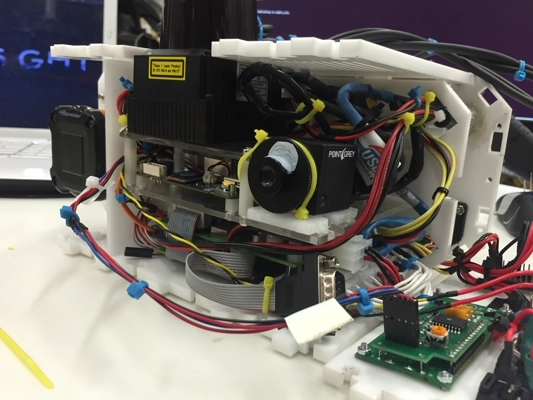
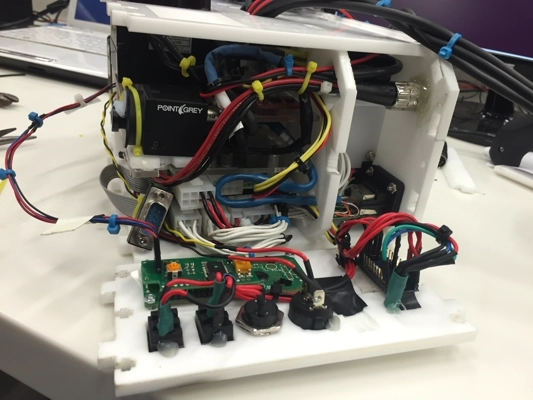
Early contract with the research centre provided an opportunity to rapidly develop a handheld unit for collecting lidar, camera and IMU data. Budget was limited aside from the provided lidar, so manufactured using in house CNC and acrylic chassis. The proposed environment for scanning was in hospitals thus guiding the housing choice design and layout.

Result
Project ended with a functioning unit, capable of collecting rosbags with time-sync’d data. Was used multiple times by PhD researchers for data collection and producing SLAM environments. This data was utilised to tune and tweak some adjust projects in the medical sector, including an assisted drive wheelchair that helps navigate obstacles based on driver intention, and a powered hoist for lifting/moving patients.