Quadcopter GPS denied operations
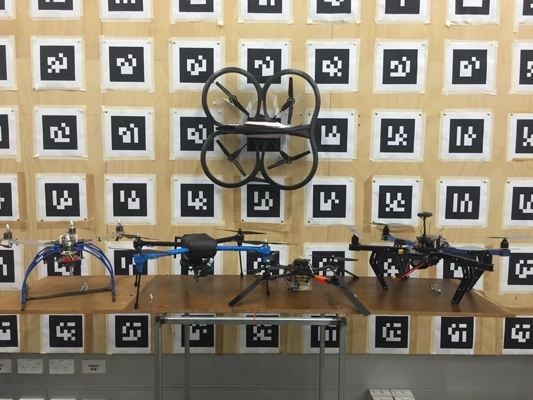
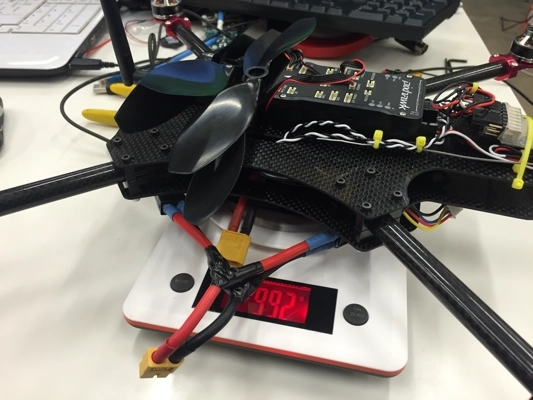
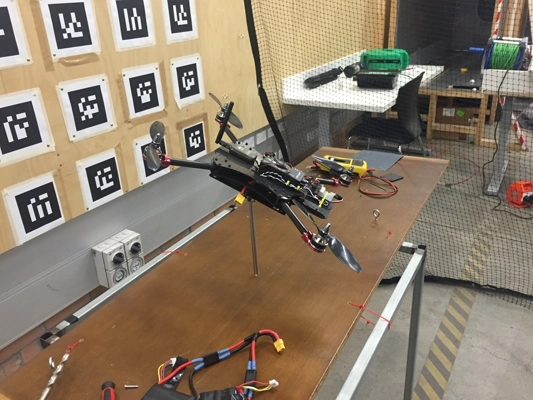
Capstone project turned into research topic chasing flight autonomy in full GPS denied environments. Advanced optical flow, feeding into EKF, ultra-sonics, quadcopter flight kinematics. Custom platform built for long range / onboard computing.
Add more info..