Pod Autonomous Cars
Approached by a angel investor / startup for some prototype development for an autonomous car pitch. At the time very few autonomous cars were on the road, and the idea was to get the throughput of train systems but with near end-to-end capabilities by developing a fully integrated on-rail system. “Pods” that you don’t own that have fixed networks running on precise timing to optimise everyones travel time. Significant reduction of incident rates, high through-put, low cost and many other benefits. Major con was the infrastructure requirements, i.e having to install dedicated lanes.
Project Overview
After initial requirements discussions, I pitched an initial set of prototypes to evaluate sensing and most importantly test the core autonomy algorithms for running these pods as consistent timing intervals across the large network was the primary technical challenge. First pass was a few different sensing technologies strapped to RC cars for quick cost efficient evaluation. Later designs were scaled down to allow large testing infrastructure by custom producing PCBs with all required components.
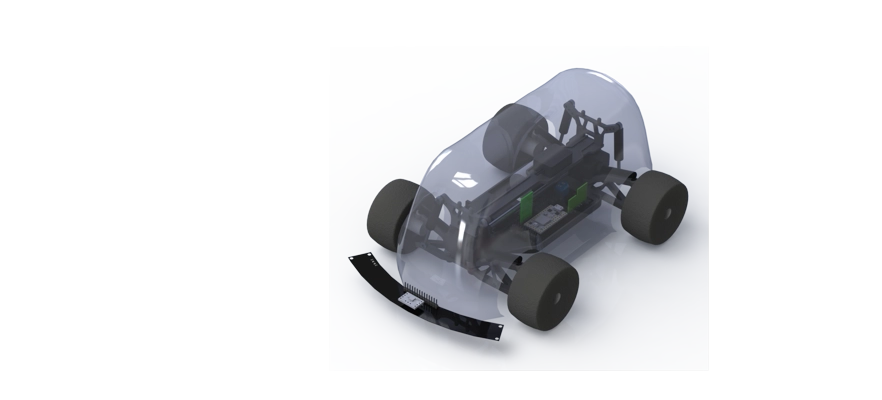
Render of an initial RC prototype, with sensing and computing all integrated. First experiences attempting complex multi-curve surfaces in SolidWorks.
Wheels hidden version of initial concept.

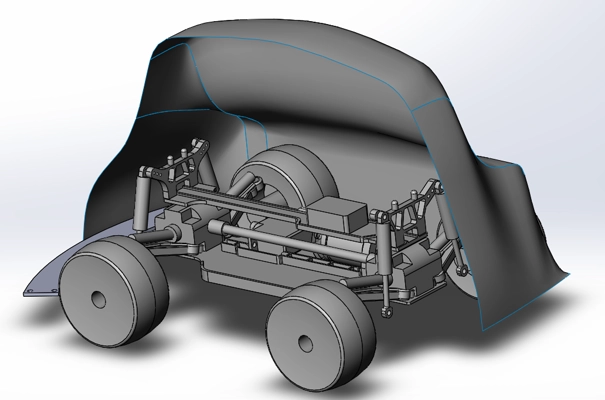
Test print of the shell for the later designs, 3D printed for scale reference.
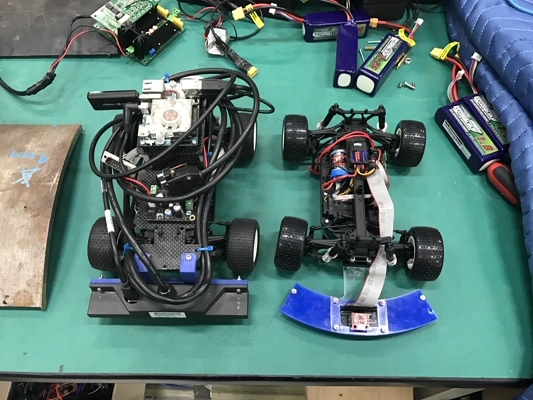
Initial sensor testing platforms, integrated magnetic sensing, IR sensing, wall and line following logic.
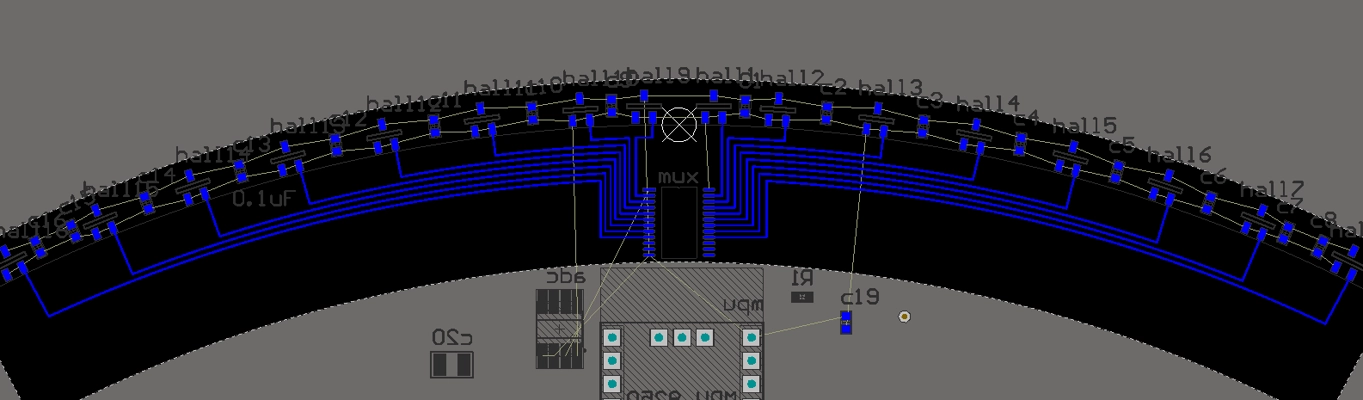
Hall effects prototype PCB demonstrating curving traces quite tricky to pull off.
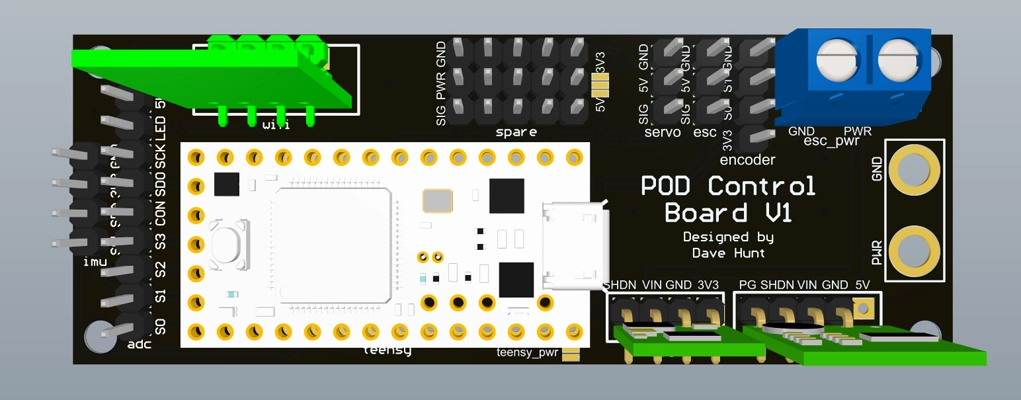
Rendering of initial RC control board. Handled all sensors and motor control, with either RC input or USB/Serial communication from on-board PC.

Early prototype PCBs for RC tests, power distribution and control, magnetic line sensing with hall effects.